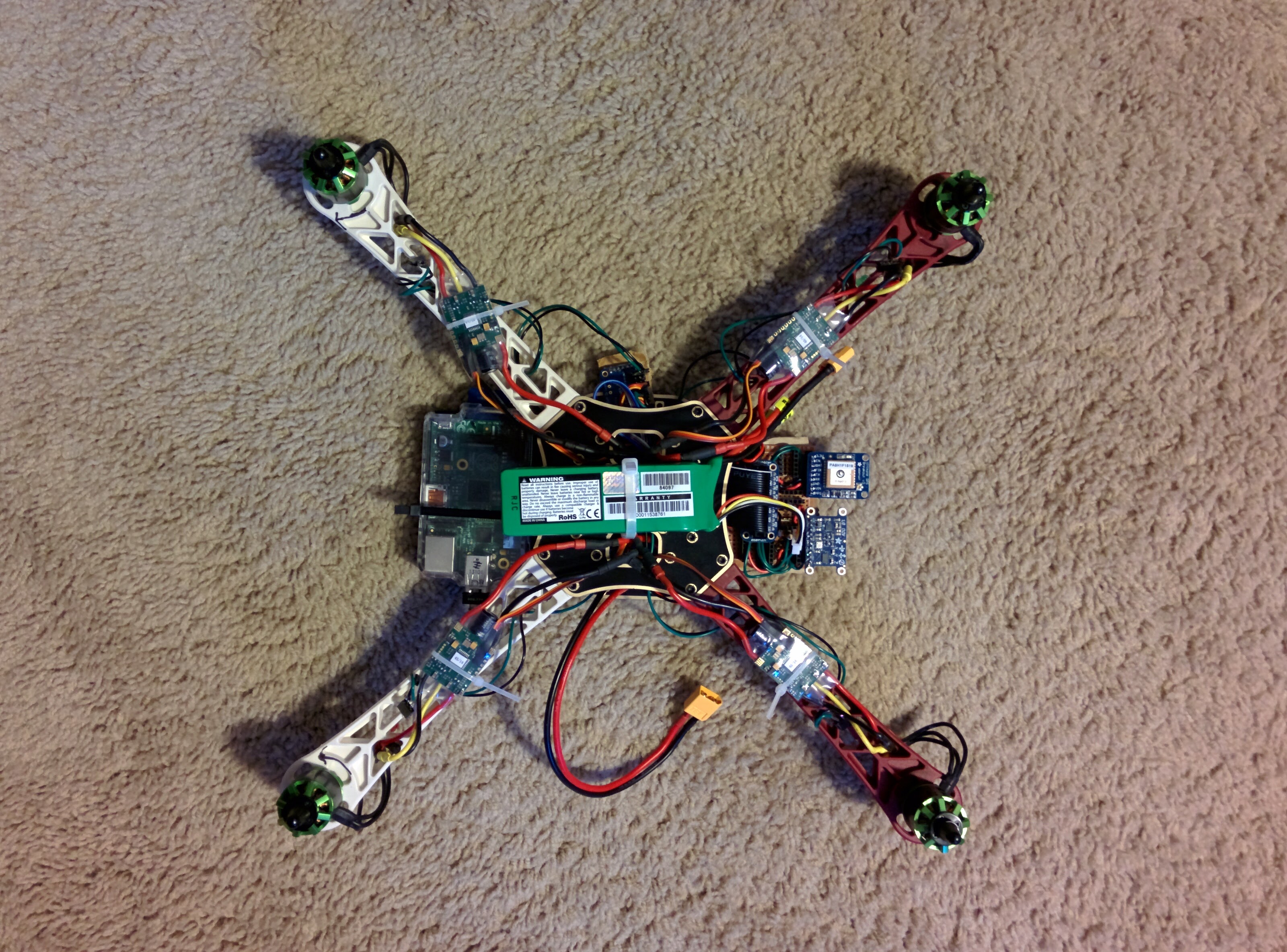
In this project, I am building a quadcopter powered by a Raspberry Pi.
The hardware side of this project was started on February 1, 2016, and I seem to be going in cycles of about 2 weeks of working on hardware (thus no Github activity) and then 2 weeks of working on software.
- 4x brushless motors and ESCs - ESC User Manual
- Battery, SBEC, and low-voltage alarm. I would suggest getting a smaller battery than I did, so it will fit in the interior of the quad frame. Mine is huge so I had to mount it on top.
- Raspberry Pi Model B. I originally tried to use a Pi 2, but the battery wouldn't supply enough power to keep it on.
- Adafruit 16-Channel Servo Driver
- GPS
- 10-DOF IMU
- Maybe a LIDAR-Lite (link goes to v2 but mine is the now-discontinued v1)
- An ultrasonic range sensors - maybe up to 5 later
- Pi camera
- Wifi USB adapter. It will act as an access point, allowing connection from another device which may be used to control the quadcopter.
- LEDs
- Frame and propellers
- A perfboard, since the connections are sturdier than those of a breadboard.
2/2/2016: Frame, motors, ESCs, propellers, and battery:

2/27/2016: Video of first...um..."flight"